 |
|---|
| Overview of SDGPS functionality PDF |
SDGPS is a C++17 collection of nodes that can be chained together to create a real-time or offline processing pipeline. The most important ones are:
The final output of the normal pipeline is a pose (position, orientation) and pose rate (velocity, angular velocity) estimate in both global world and local odometry frames. Using listen-solution-tcp, that data is encoded as JSON and broadcast at up to 1000 Hz to any clients connected on a TCP socket.
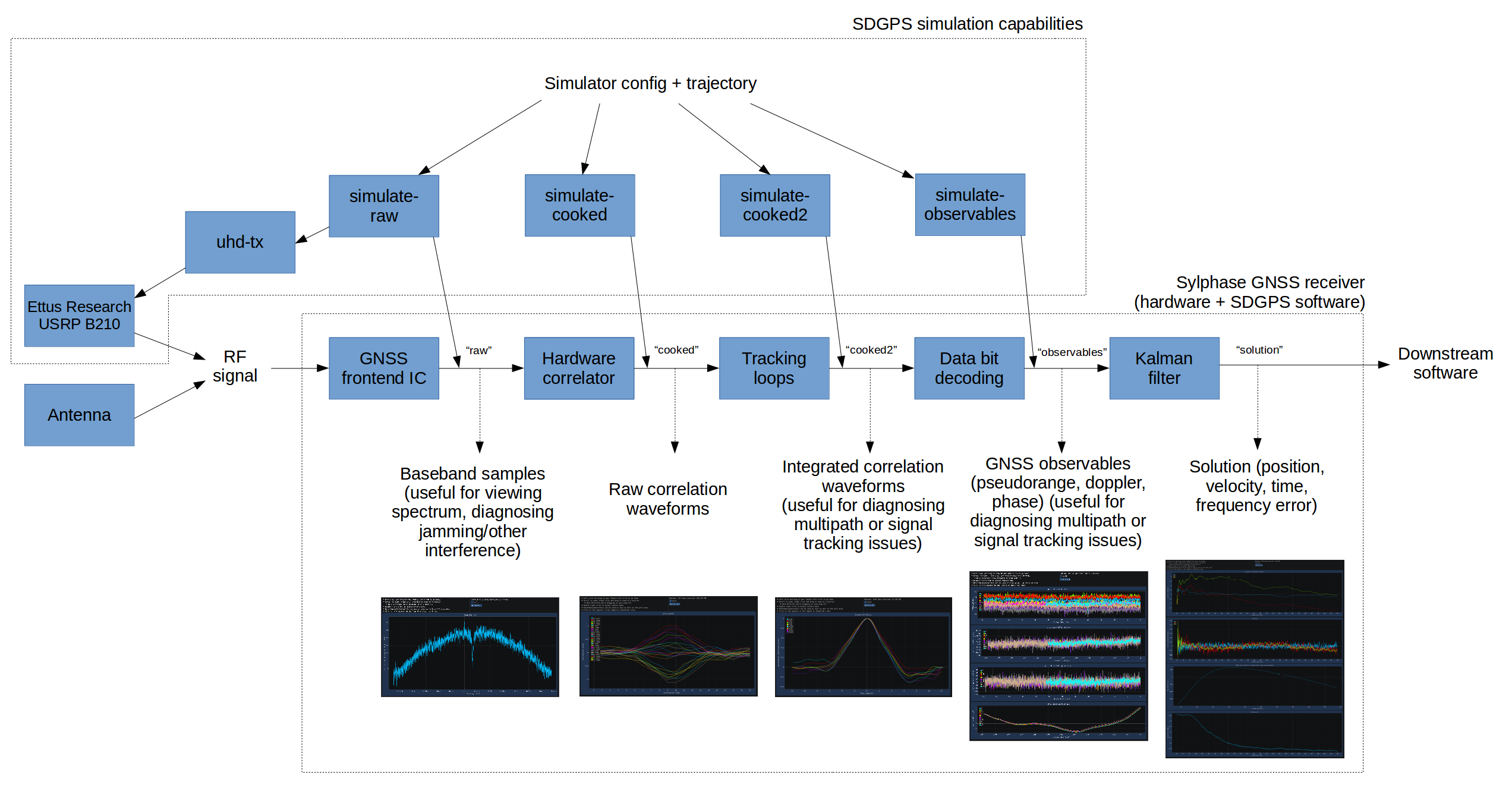
Many other nodes exist, but they are primarily to enable testing and verification of the previously mentioned nodes. They include nodes to record and play back any type of exchanged data, nodes to simulate GPS signals and sensor inputs given a path through space, and a software correlator implementation. Below is an overview of the SDGPS interfaces and nodes.
 |
|---|
| Nodes and interfaces in SDGPS. Interfaces are boxes and nodes are the edges between them, representing how a node processes one data format into another. The listen-*-tcp, connect-*-tcp, read-*-file, write-*-file, and replace-config nodes, which exist for every interface, are excluded from here to avoid clutter. |
 |
|---|
| Infix-2 with packaging |
Welcome to the SDGPS manual!
We hope you'll find our manual helpful on your projects.